






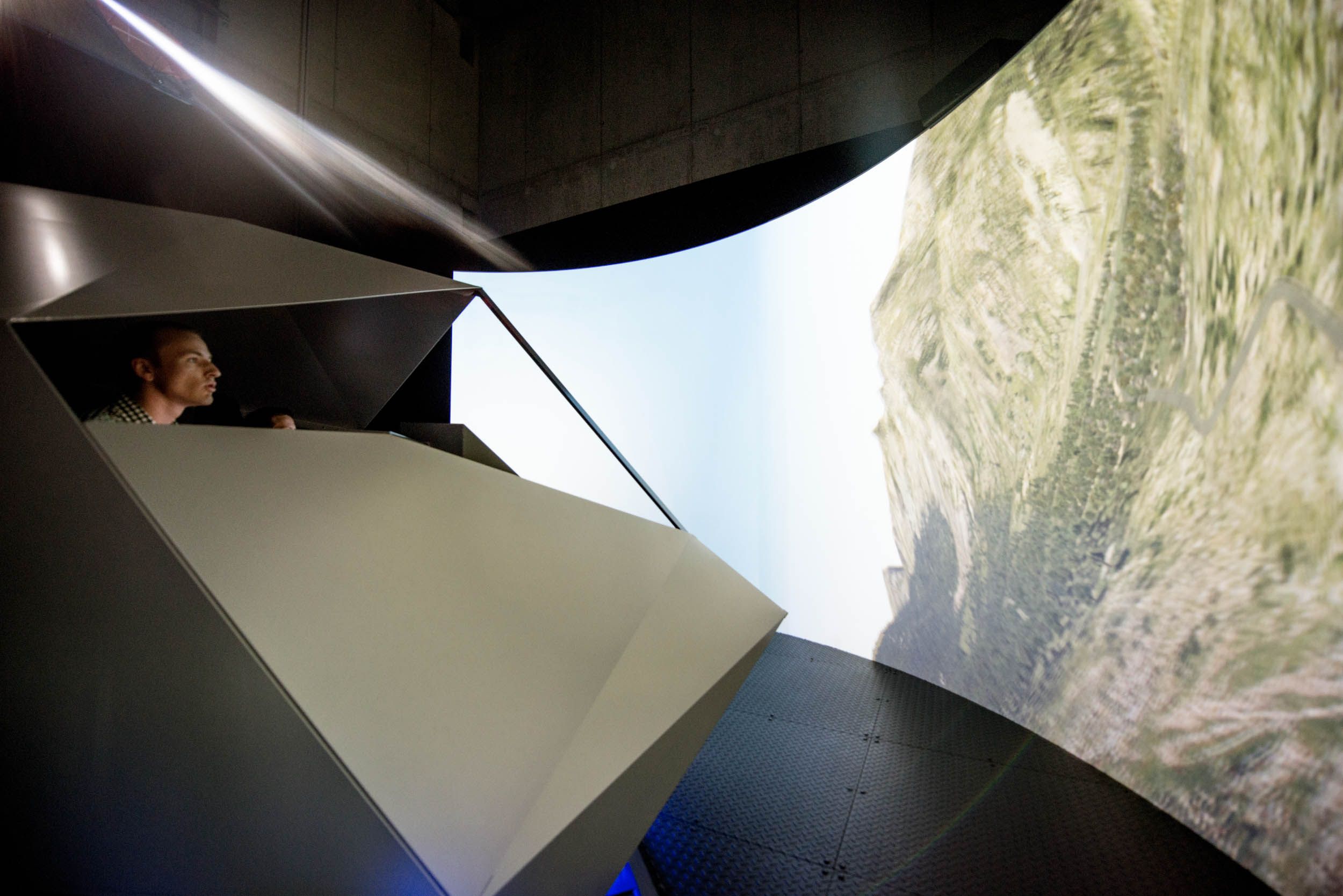
The static flight simulator JFS²
JFS² was designed as a simulator for research purposes. Its remit ranges from stability tests for new aircraft which are still in the planning stage and simulations of the latest fly-by-wire control systems for small aircraft through to the development of autonomous control systems for unmanned aerial vehicles (UAVs). State-of-the-art software technologies and modern, three-channel external visual systems have been combined into a high-tech simulator of a most challenging design.
Flight dynamics equations and control algorithms are computed using the numerical solution of differential equations to generate precision, state-of-the-art models of aircraft physics. The flight dynamics is computed using MATLAB/Simulink, differentiating this simulator from those used in computer games. These simulation programs are not based on real flight dynamics computations; a commercial flight simulation program (X-Plane 10) is only used to generate the graphic display of the exterior view.
Command inputs given by the pilot and co-pilot using the primary controls – side-stick, pedals and throttle – are sent to the simulation program via the CAN data bus. The simulation program then computes the new flight status based on the ambient conditions and command inputs. The position and attitude data are then transferred to the vision calculator, where the graphic display of the exterior view is computed. A portion of the flight status data, such as altitude and speed, is returned to the cockpit for presentation on the instruments and displays. A console also provides the option of adding external input into the simulation, for example to simulate engine and instrument failure, or to alter the weather conditions.



